










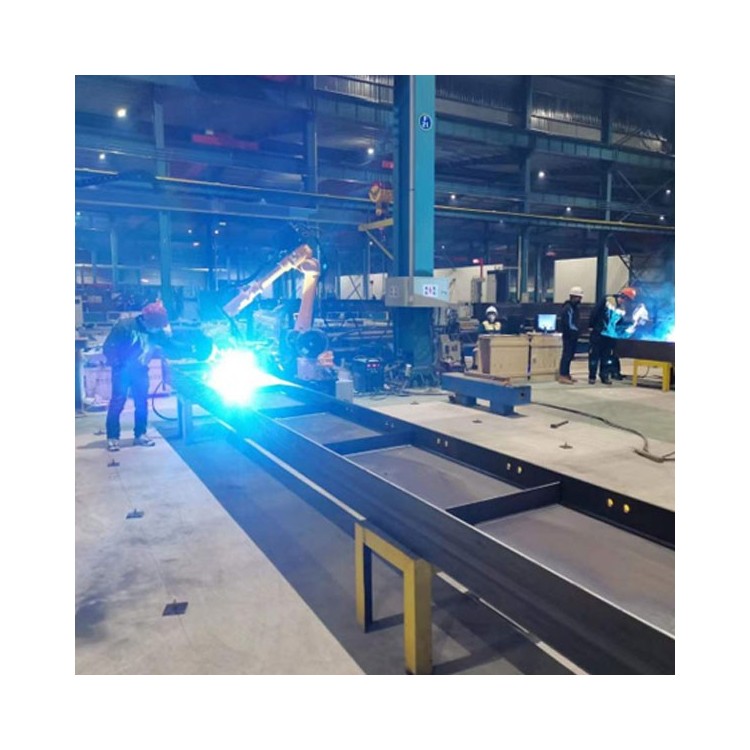
Welding robots consist of two main parts: the robot itself and the control cabinet (hardware and software). Welding equipment, such as for arc welding and spot welding, includes the welding power supply (including its control system), wire feeder (for arc welding), welding clamp, etc. Intelligent robots should also have a sensor system, such as laser or camera sensors and their control devices.
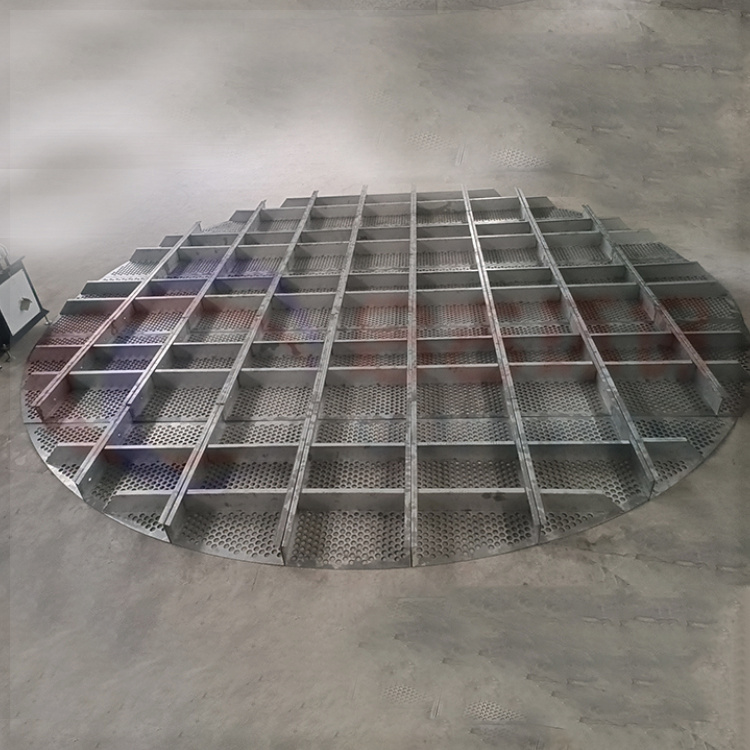
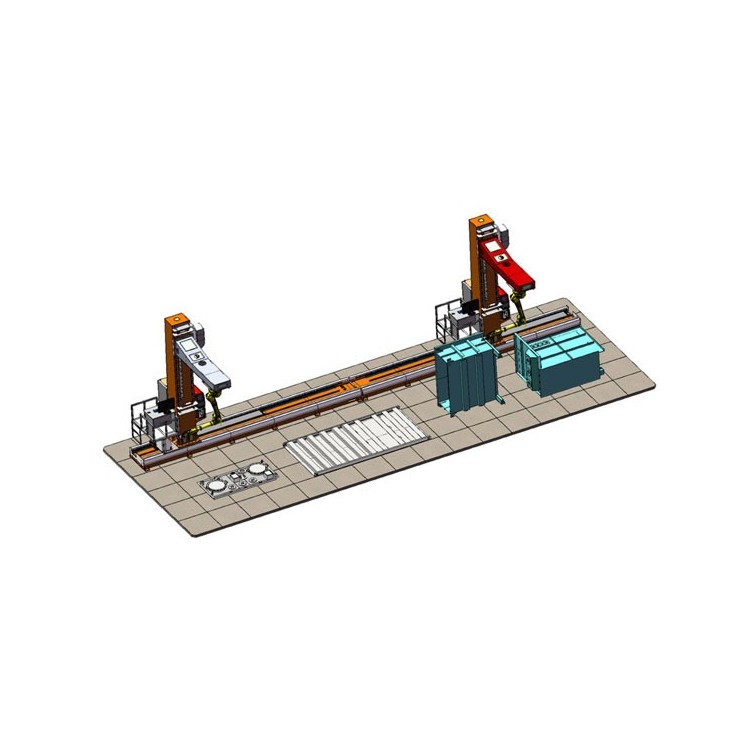
If the workpiece does not require any positioning changes throughout the welding process, it can be secured in place on the workbench using fixtures, making the system quite simple. However, in actual production, many workpieces need to be repositioned during welding to ensure the weld joint is in an optimal position (orientation). In such cases, the manipulator and robot can either move separately—meaning the manipulator repositions first, followed by the robot welding—or simultaneously, with the manipulator changing positions while the robot welds, which is commonly referred to as coordinated motion between the manipulator and the robot. At this point, the combined movement of the manipulator and the robot allows the weldClampCompared to the movement of the workpiece, it can meet both the weld path and the welding speed requirements.ClampAxis requirements. In fact, at this point, the axis of the transposer has become part of the robot. This welding robot system can have up to 7-20 axes, or more.
The control cabinet for robots can coordinate the movement of 12 axes between two robots. One is a welding robot, and the other is a handling robot used as a positioning machine.
WeChat Official Account

Scan to follow Official Account